
COMP363101 Intelligent Systems and Robotics
智能系统代写 After the Tohoku earthquake in Japan, on 11 March 2011, a tsunami hit the Fukushima Nuclear Powerplant. The damage resulted in
Question 1 智能系统代写
(a) (i) How is hysteresis thresholding used in the Canny Edge detector?[3 marks]
(ii) Briefly describe how SIFT achieves scale and rotation invariance.[3 marks]
(iii) Explain the differences between the methods used to generate a SIFT descriptor from a point cloud acquired by an active device and an image acquired from a camera in a stereo camera head.[3 marks]
(iv) Explain the potential advantages of using both an active device and stereo camera system together to perform navigation of a robot in an unknown environment. [3 marks] 智能系统代写
(b) A Convolutional Neural Network (CNN) has an Input layer containing a 13 x 13 image that is connected to a Convolution layer using a 4 x 4 filter and a stride of 1. Only filters that are entirely inside the input array are connected to a unit in the Convolution layer.
The units of the Convolution layer have no activation function associated with them. The Convolution layer is connected to a max Pooling layer using a 2 x 2 filter and a stride of 智能系统代写
- Only filters that are entirely inside the array in the Convolution layer are connected to a unit in the Pooling layer. The Output layer contains 4 units that each use a ReLU activation function and these units are fully-connected to the units in the Pooling layer.
(i) How many units are in the Convolution layer? [1 mark] 智能系统代写
(ii) How many distinct weights must be learned for the connections to the Convolution layer? [1 mark]
(iii) How many units are in the Pooling layer? [1 mark]
(iv) How many distinct weights must be learned for the connections to the Output layer? [1 mark]
(c) State whether the following statements are true or false and justify your answer. These statements do NOT refer to the specific CNN described above, but rather are about CNNs in general.
(i) CNNs can learn to recognize an object in an image no matter how the object is translated (i.e., shifted horizontally and/or vertically) even if the training set only
includes that object in one position. [2 marks]
(ii) CNNs can learn to recognize an object in an image no matter how the object is rotated (in the image plane) even if the training set only includes that object in one
orientation. [2 marks]
Question 2
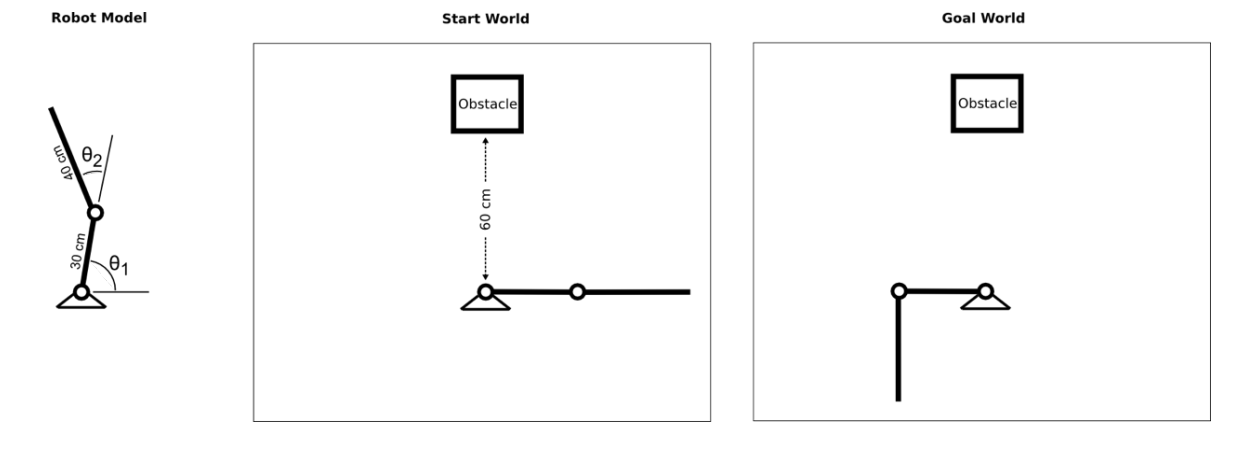
(a) Consider the robot arm shown below under ‘Robot Model’. The arm has two links: the first, lower, link is of length 30 cm; and the second, upper, link is of length 40 cm. The arm has two rotational joints Θ1 and Θ2. As shown, Θ1 is measured with respect to the rightward horizontal axis of the robot base.
Θ2 is measured with respect to the axis formed by the first link. Suppose that there are hard mechanical limits to how far the joints can rotate: Θ1 cannot go below 0 radians and it cannot go above Π radians. Θ2 cannot go below 0 radians and it cannot go above Π/2 radians. The configuration of the robot when both joints are at their lower limits (Θ1=0, Θ2=0) is shown in the ‘Start World’. Similarly, the configuration of the robot when both joints are at their upper limits (Θ1=Π, Θ2=Π/2) is shown in ‘Goal World’. 智能系统代写
(i)Consider that this robot is placed in ‘Start World’ as shown above, which includes a rectangular obstacle. The obstacle is of distance 60 cm to the robot base. Below, we show the configuration space of this robot and we label different configurations as qi.
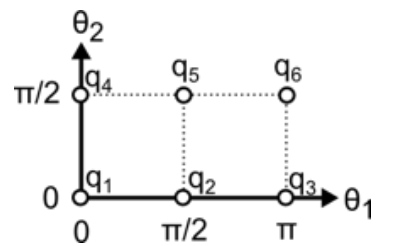
Which qi is / are in the configuration space obstacle for this robot? [3 marks] 智能系统代写
(ii) Take the robot configuration in the ‘Start World’ as the robot’s start configuration. Suppose that we want to move the robot to the goal configuration shown in ‘Goal World’. Suppose the configuration space above is converted into a search graph for you as shown below.
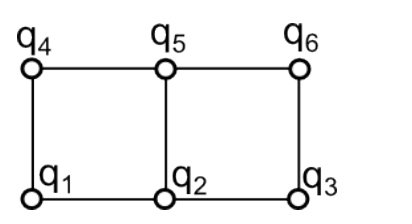
If you search for a path from the start configuration to the goal configuration in this graph, what would be the shortest path that avoids the obstacle? Please
write the path as a sequence of configurations qi. For example your answer would be “q1 → q2 → q3 → q6 → q5 → q4” , if you believe q1 is the start configuration, q4 is the goal configuration, and the shortest path is given by the intermediate configurations in the sequence.
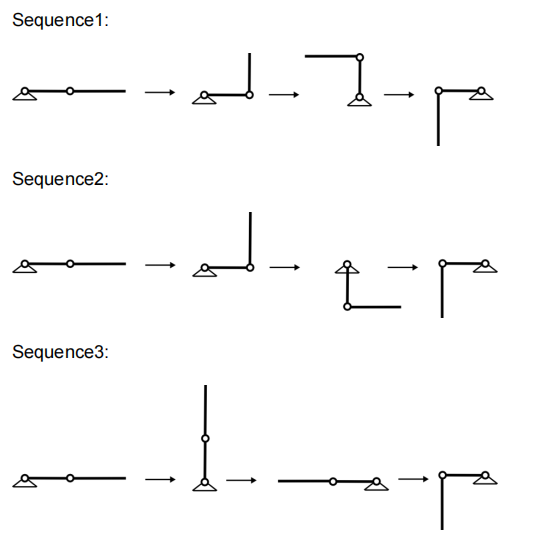
(iii) Below we show three possible sequences of motion. Which one of these is the shortest sequence of motion to move from the start configuration to the goal configuration while avoiding the obstacle, Sequence1, Sequence2, or Sequence3?
(b)
(i) What is the primary condition for statically stable locomotion? Explain using one or two sentences. [2 marks]
(ii) What is the minimum number of contacts needed with the ground during statically stable locomotion? [2 marks]
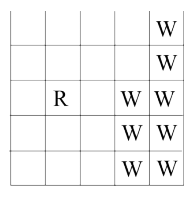
(c) Suppose you are given the grid world below with a robot in it. The grid cell that the robot is currently in is marked with an ‘R’ and you are certain that the robot is there initially. Some cells are walls, marked with ‘W’.
The unmarked cells are free. The robot can move left, right, up, and down in the grid world. It cannot rotate. The robot also has a sensor which is pointing towards the right, and the sensor returns the number of free cells in that direction between the robot and the wall. For example, in the scene below, the correct sensor reading would be 1, since there is only one free cell to the right of the robot until the wall. 智能系统代写
Suppose the motion noise is such that, when the robot tries to move to another cell, it moves there with 0.8 probability, but stays in its current cell with 0.2 probability. Suppose the sensor noise is such that, given the correct reading, d, the sensor returns d with probability 0.5, returns d+1 with probability 0.25, and returns d-1 with probability 0.25.
(i) Suppose the robot takes the action of moving up. Please draw a 5-by-5 grid. In each cell, show the probability that the robot is located in that cell (i.e. the
belief) after the action update. (You can leave cells with 0 probability empty). [3 marks] 智能系统代写
(ii) After the action is executed, suppose the robot queries its sensor and reads the value 2. Please draw another 5-by-5 grid. In each cell, show the probability that the robot is located in that cell (i.e. the belief) after the perception update. (You can leave cells with 0 probability empty). [5 marks]
Question 3
After the Tohoku earthquake in Japan, on 11 March 2011, a tsunami hit the Fukushima Nuclear Powerplant. The damage resulted in nuclear meltdowns and release of radioactive material --- one of the worst nuclear disasters in history. Due to high radioactivity, the site was not safe for humans to enter and prevent further damage. Robots have been deployed, with some degree of success.
Suppose you were tasked to develop a robotic system to go into such a disaster building, to reach a specific room, and to rotate and turn off a valve to stop a leak. Please answer the questions below, with this system in mind.
(a) After the tsunami, the ground is littered with sand and rubble. What type of locomotion would you design for your robot? Explain in 1-2 sentences. [2 marks]
(b) Assume that you are given a blueprint (i.e. a map) of the nuclear facility, which includes the room with the valve and also a possible entrance point to the facility for your robot. Name algorithm(s) you can use to generate a path. [3 marks] 智能系统代写
(c) What type of sensor(s) would you put on your robot to support localisation of the robot in the facility? [2 marks] 智能系统代写
(d) Suppose the robot managed to reach the room and approached the valve. Suppose your robot has an arm, and its cameras are able to output the exact position of the valve with respect to the robot arm base. You want your robot to raise the arm to reach and grasp the valve. How can the robot know which arm joint angles to use as the goal? Explain in 1-2 sentences. [3 marks]
(e) A schematic diagram of the appearance of the valve is shown below. It consists of a circular wheel shape, with a bar across the centre of it.

Describe the approach you would use to enable the robot to correctly identify the location of the valve. Discuss the strengths and weaknesses of your approach.
[4 marks]
(f) In order to turn of the valve the robot must either:
(i) Rotate the valve up to 360 degrees or
(ii) Rotate the valve until the colour of a circular lamp above the valve changes from green to red.
Describe the algorithms you would use to detect if these events had occurred.
Discuss the strengths and weaknesses of your approach. [6 marks]
 更多代写:
更多代写:

发表回复
要发表评论,您必须先登录。